
ロボット操作盤のパネル銘板
2024年7月5日
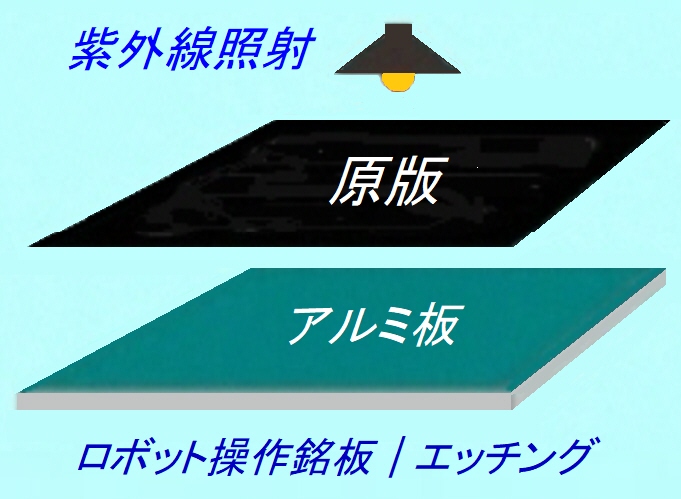
<例>アルミパネルエッチング
【ロボットティーチング】
ロボットティーチング(Robot Teaching)、ロボットに特定の作業や動作を教える技術およびプロセスを指します。これにより、ロボットは自律的に特定のタスクを実行できるようになります。ロボットティーチングは、産業用ロボット、サービスロボット、教育用ロボットなど、さまざまな分野で使用されます。
ロボットティーチング(Robot Teaching)、ロボットに特定の作業や動作を教える技術およびプロセスを指します。これにより、ロボットは自律的に特定のタスクを実行できるようになります。ロボットティーチングは、産業用ロボット、サービスロボット、教育用ロボットなど、さまざまな分野で使用されます。